PRESSZONE
Unitree Robots: Why Do I Need an Onboard Jetson GPU?
The range of UNITREE ROBOTS are suitable for a wide range of robotic automation tasks in industries such as manufacturing, warehousing and logistics, security and inspection, and healthcare. As each model of robot is available in several varieties using suffices such as EDU or PRO, in this blog were going to explain how to pick the right model for you.
All models in a range will feature basic intelligence inbuilt for educational demonstrations and consumer use, but if you want to take full advantage of a robots potential, then you need to be looking for versions with an onboard NVIDIA Jetson GPU. The addition a GPU unlocks richer sensor capabilities and greater access control, achieved via the use of the official Unitree SDK and the open-source ROS (robot operating system). Using the Unitree R1 humanoid robot as an example, it is only the EDU version that offers the inbuilt GPU.
| MODEL |
 Unitree R1
Unitree R1
|
||
|---|---|---|---|
| VERSION | AIR | Standard | EDU |
| USE CASE | Consumer & demonstration | Consumer & demonstration | Research & AI development |
| JOINT DEGREES OF FREEDOM | 20 | 26 | 40 |
| BATTERY | 5Ah (hot-swap) | 5Ah (hot-swap) | 5Ah (hot-swap) |
| BATTERY LIFE | 1h | 1h | 1h |
| ARM PAYLOAD | 2kg | 2kg | 2kg |
| MAXIMUM SPEED | 3m/s | 3m/s | 3m/s |
| COMPUTE | 8-core CPU | 8-core CPU | 8-core CPU & NVIDIA Jetson Orin NX GPU |
| AI | X | X | √ |
| DIMENSIONS | 1230 x 357 x 190mm | 1230 x 357 x 190mm | 1230 x 357 x 190mm |
| WEIGHT | 25kg | 29kg | 29kg |
The ROS provides a set of tools, libraries, and FRAMEWORKS to simplify complex robot software development by making it modular, real-time capable, secure, and cross-platform - such as NVIDIA Isaac and GR00T. When combined with the onboard GPU hardware it unlocks programming with C++ and Python languages, enabling features such as motion programming and state feedback. It also offers options to enhance physical attributes, such as the joint degrees of freedom (DOF), directly impacting manipulation, load-bearing, whole-body control, and coordination. On some humanoid models, optional dextrous hands can be added to allow for highly intricate tasks, using force-position hybrid control, so it is sensitive and reliable, and can simulate human hands to achieve precise operation of objects.
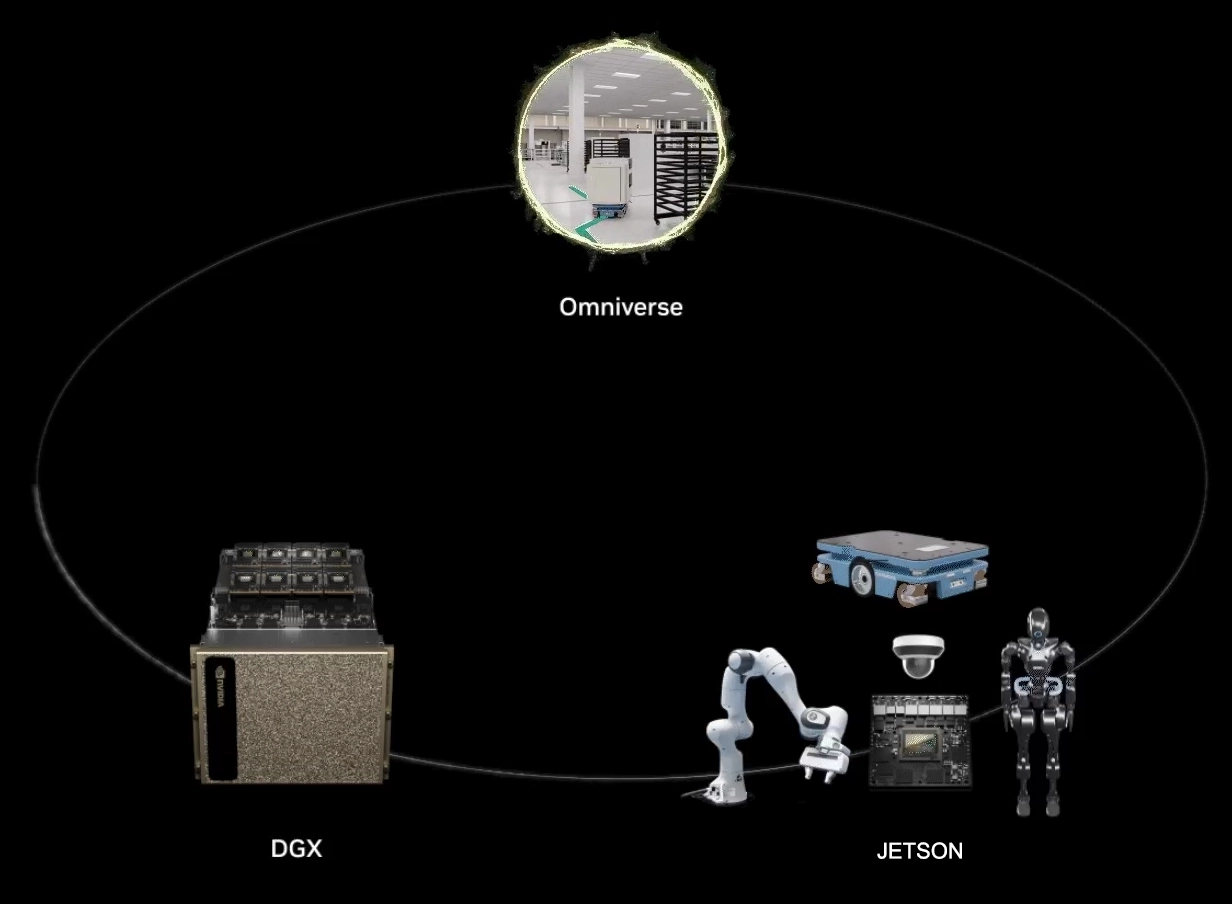
An onboard Jetson GPU is essential for performing the inferencing functions these additional features require - look out for EDU or PRO suffixes. However, if you want to introduce advanced AI automation and learning, especially in complex environments then the data and processing demands need a whole other level of performance. This is often referred to as the three-computer problem, or the three-computer solution, as three distinct levels of compute are required to achieve this - NVIDIA DGX, NVIDIA Omniverse and NVIDIA Jetson.
To explain why AI robotic systems are much more complicated than other types of AI model, imagine an algorithm designed to recognise five types of cooking utensil. This requires training a model to recognise cooking utensils and a camera sensor to see the various types. Now add in the ability to pick up these utensils and use them - the camera element now needs the addition of robotic arms and further training of how each utensil is used. Now add mobility so the robot can recognise, pick up and use the utensil, but only in the correct kitchen location - this adds more training on processes plus a spatial understanding of its environment. Finally, make the robot work in a crowded kitchen where it may be obstructed or knocked off balance mid-task - the training now needs to include how to negotiate obstacles and how to recover an interrupted task, without causing injury as some collisions may be with softer humans rather than harder surfaces.
You can see how the additional layers of complexity at each stage require a whole new level of training data and parameters to give the robot any chance of success. This is where the three computers come in - firstly, powerful multi-GPU DGX SYSTEMS are required to train datasets and then fine-tune the model. Next, RTX PRO SERVERS - designed for advanced visualisation tasks - support the OMNIVERSE real-time collaboration cloud platform. This enables simulation of the environments and human-robot interactions, so all scenarios can be tried and tested. Most importantly, mistakes and errors can be ironed out in the Omniverse digital twin so costly real-world mishaps can be avoided. All of the aforementioned NVIDIA platforms are available in SCAN CLOUD. Finally, onboard Jetson modules allow the finalised model to be deployed directly on the robot so it can perform as intended. You can learn more about our range of robots and their AI-powered capabilities by reading our ROBOT BUYERS GUIDE.