Robots Buyers Guide
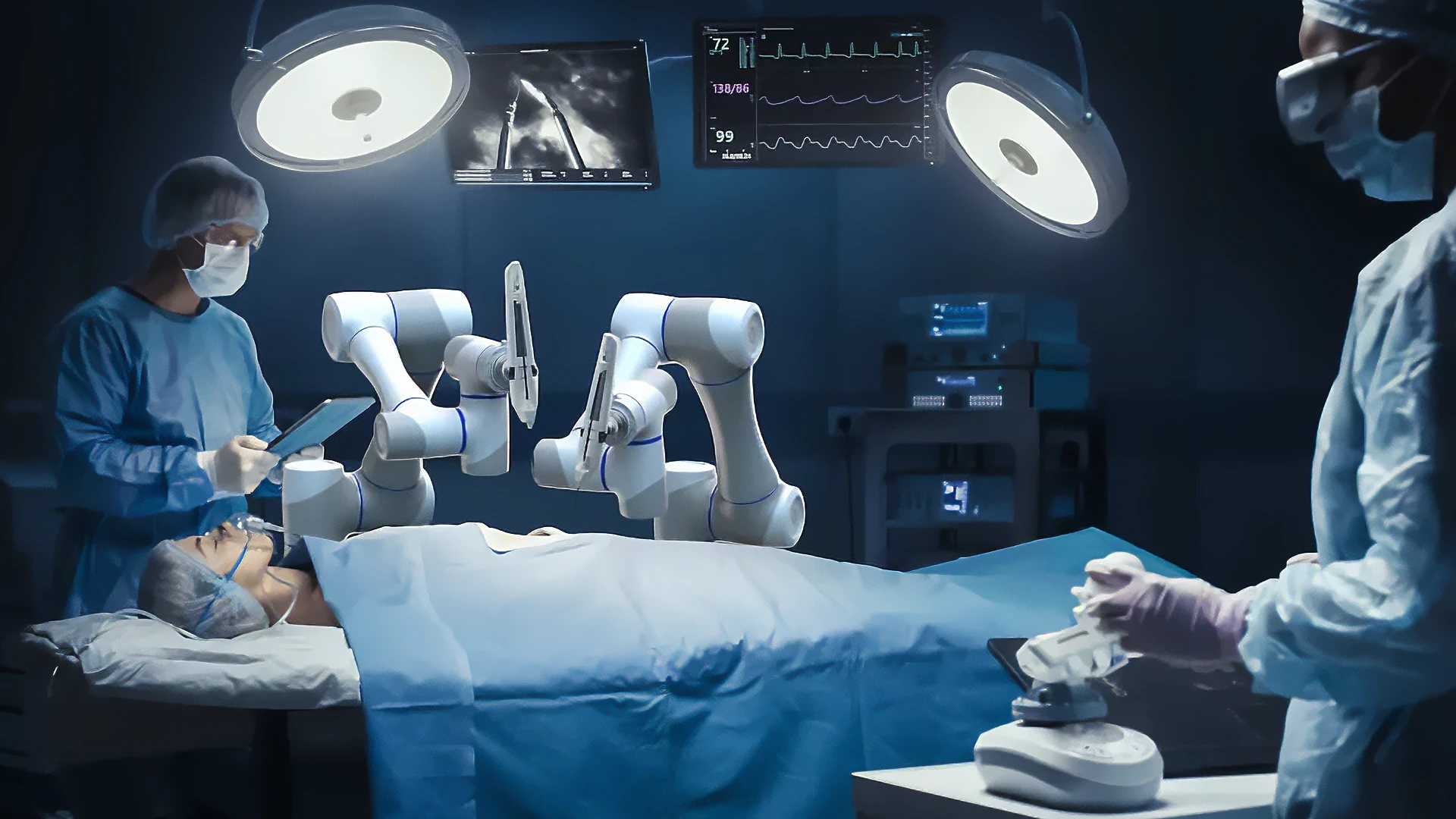
Robots are becoming increasing applicable across a wide range of industry verticals. In the same way that about ten years ago, advances in GPUs plus the ready availability of large datasets fueled AI model development; recent advances in LLMs and agentic AI models capable of reasoning, has ushered in a new dawn of physical AI, embodied by robots that can interact with the real-world and ourselves.

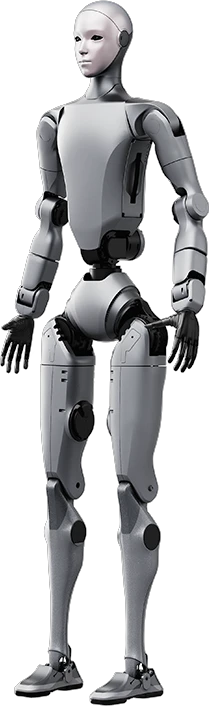
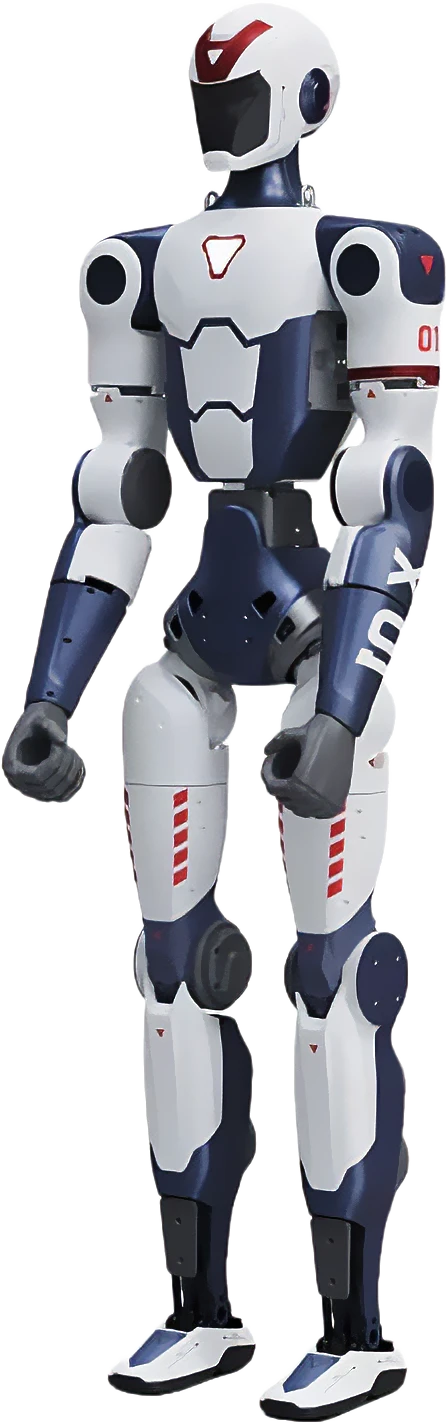
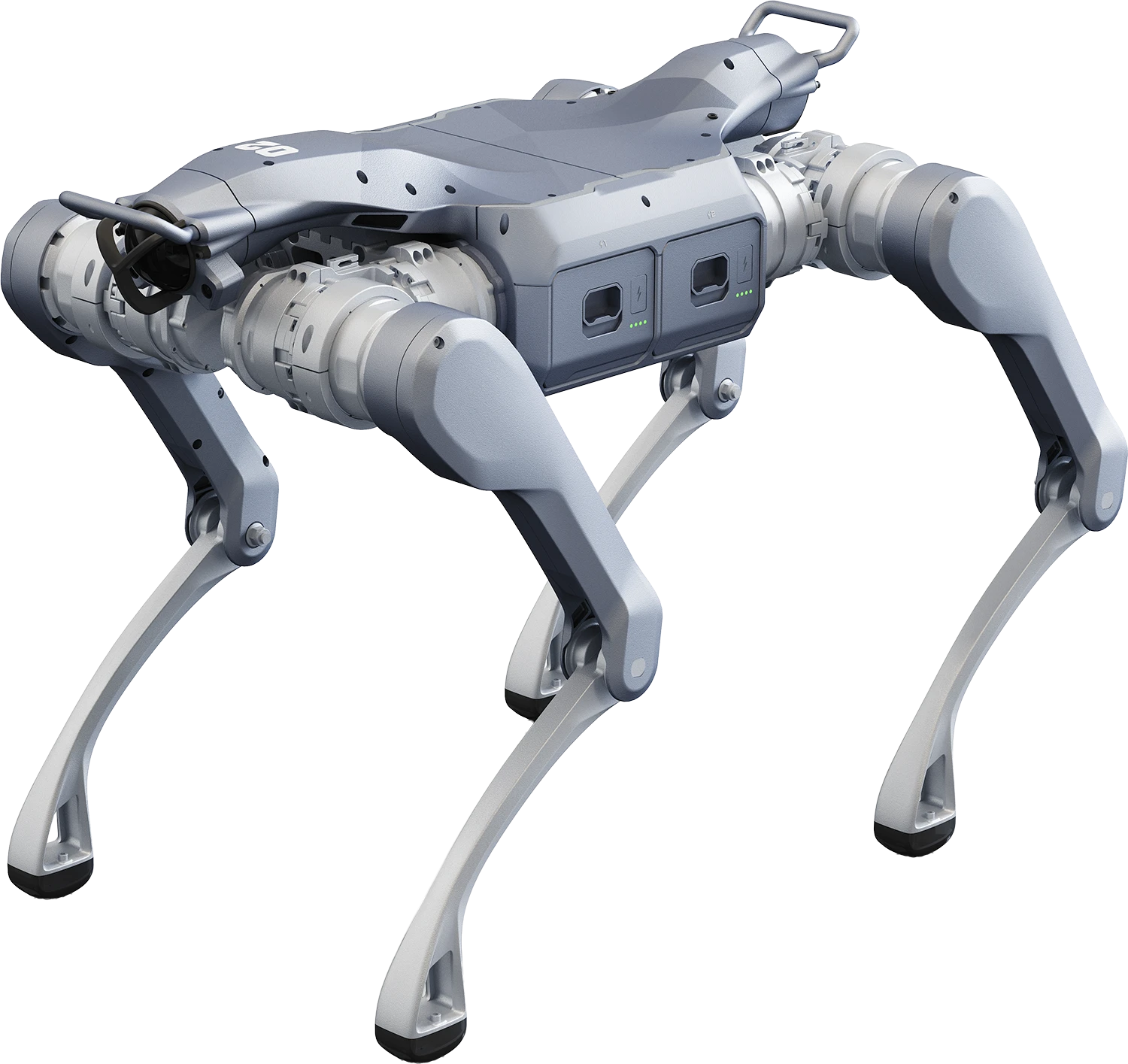
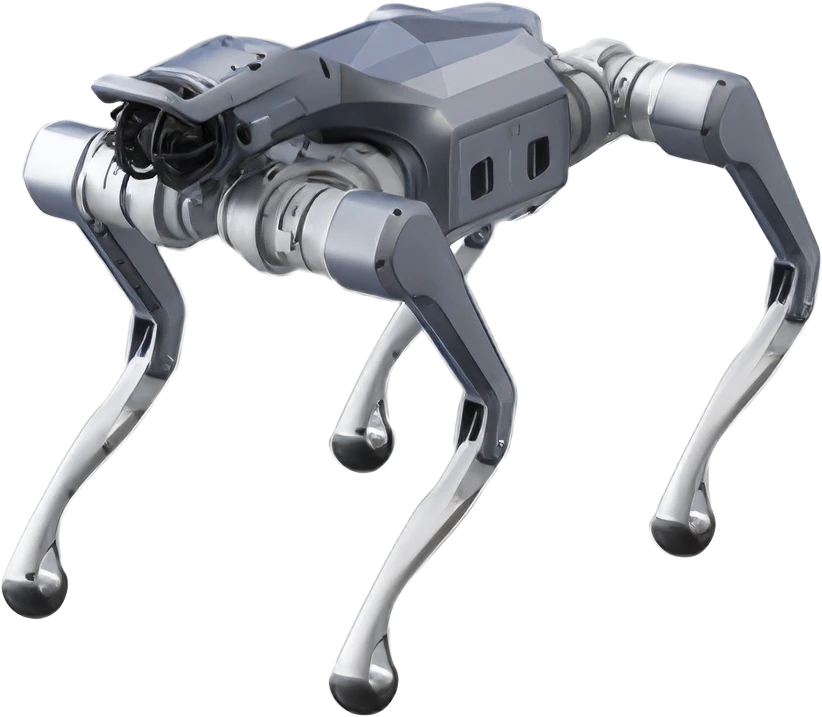
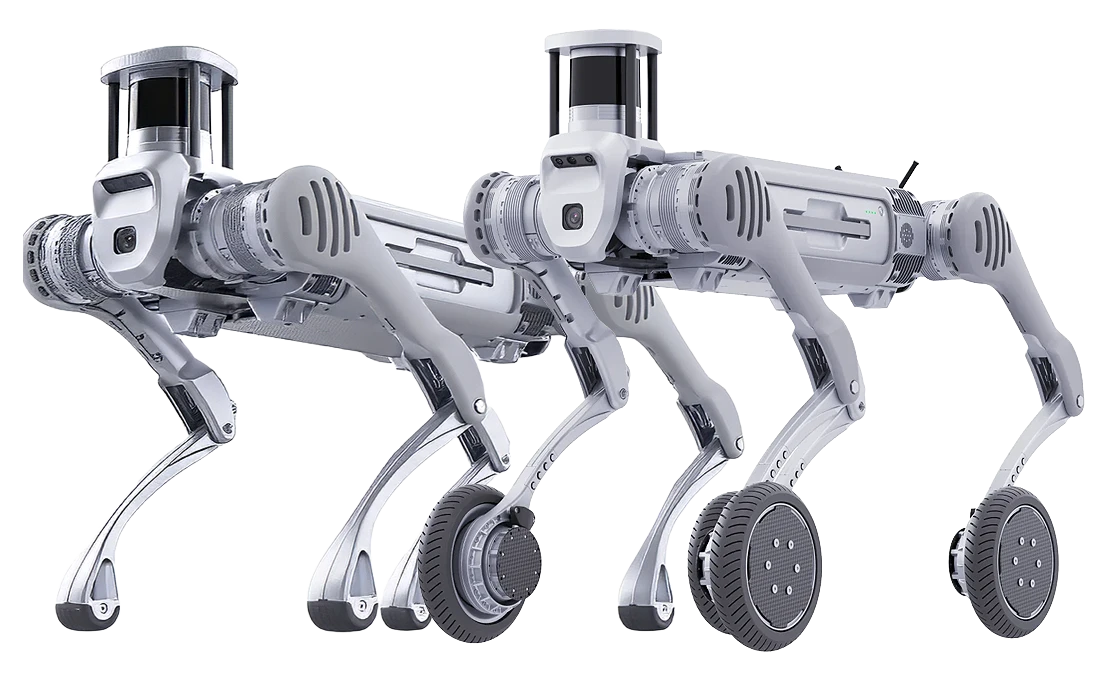
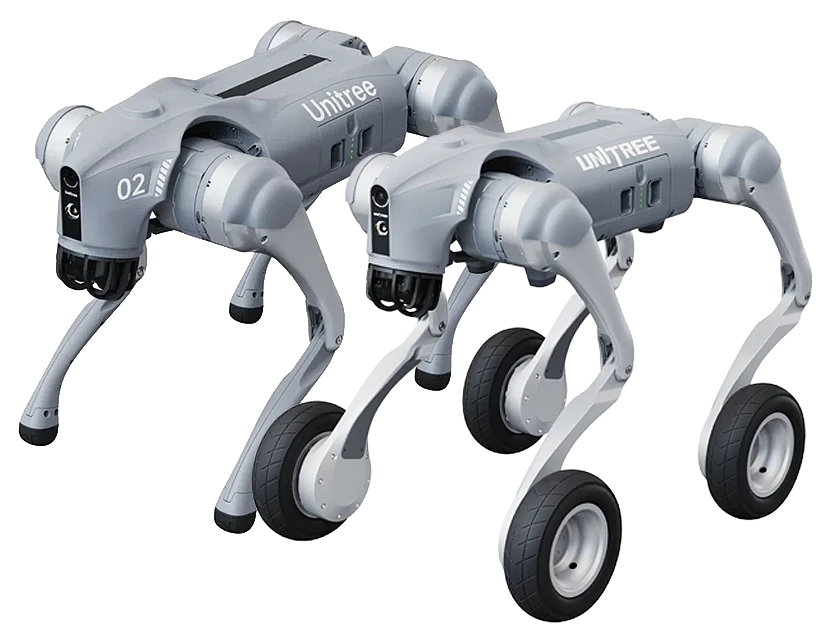
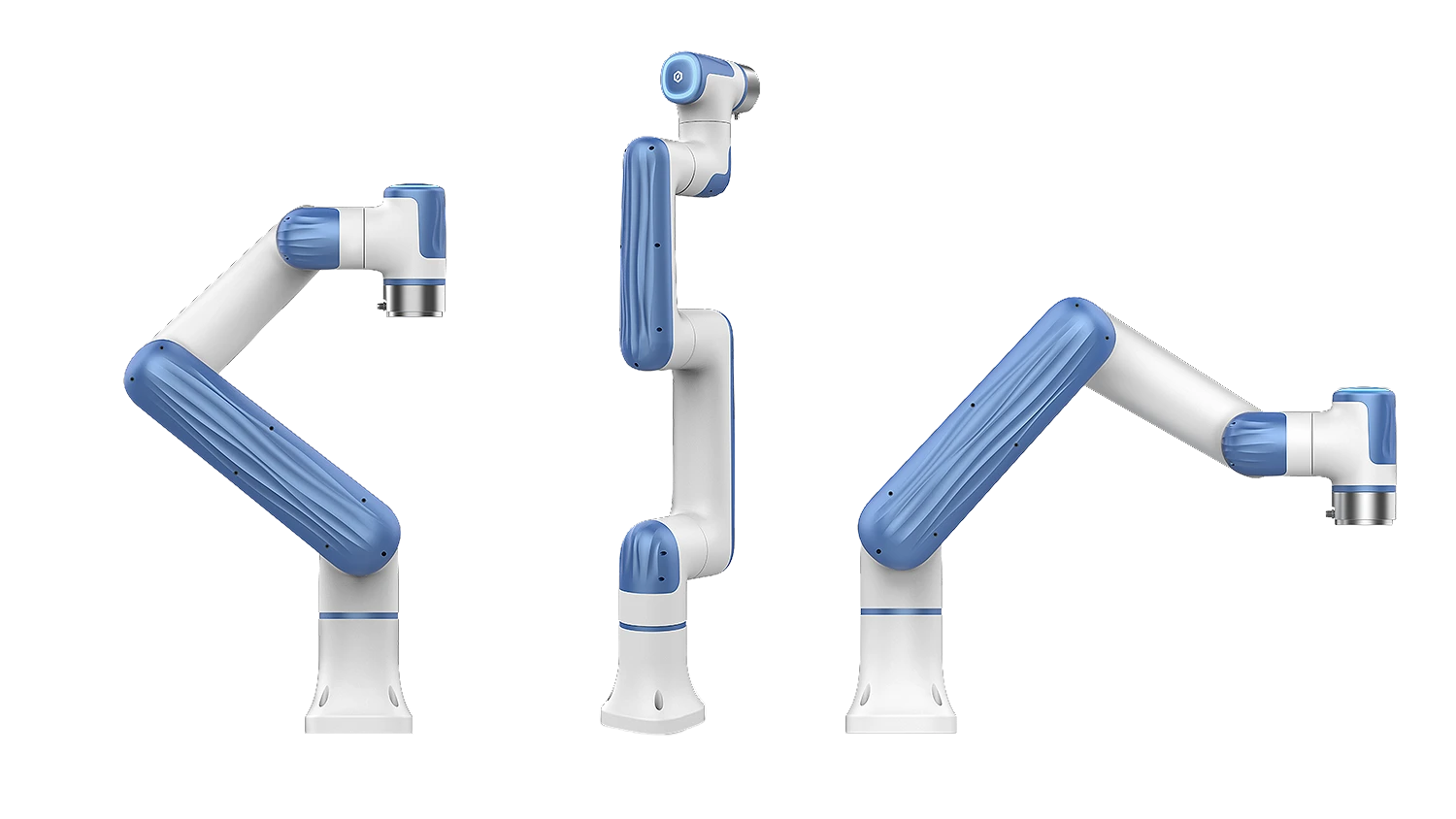
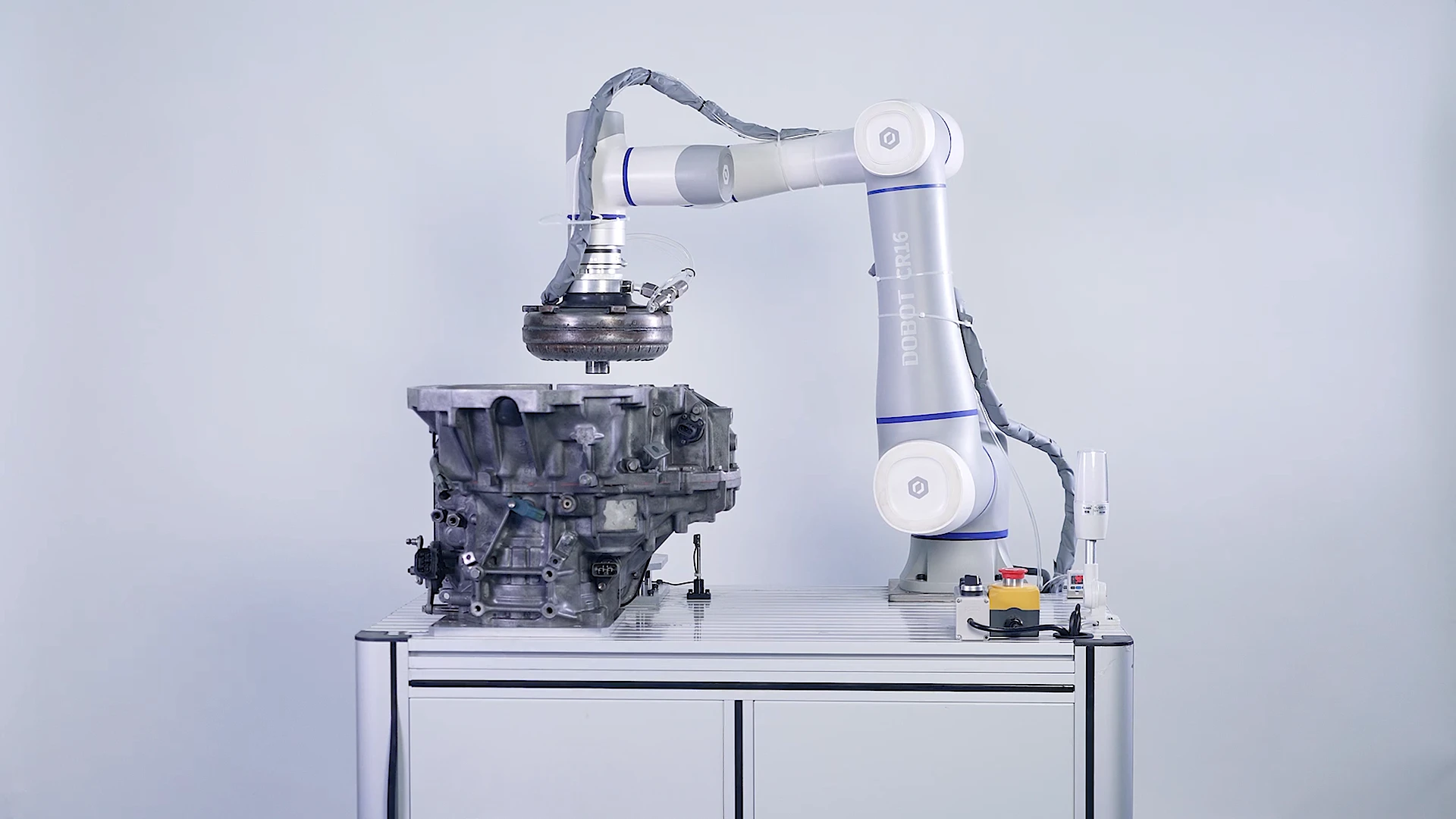
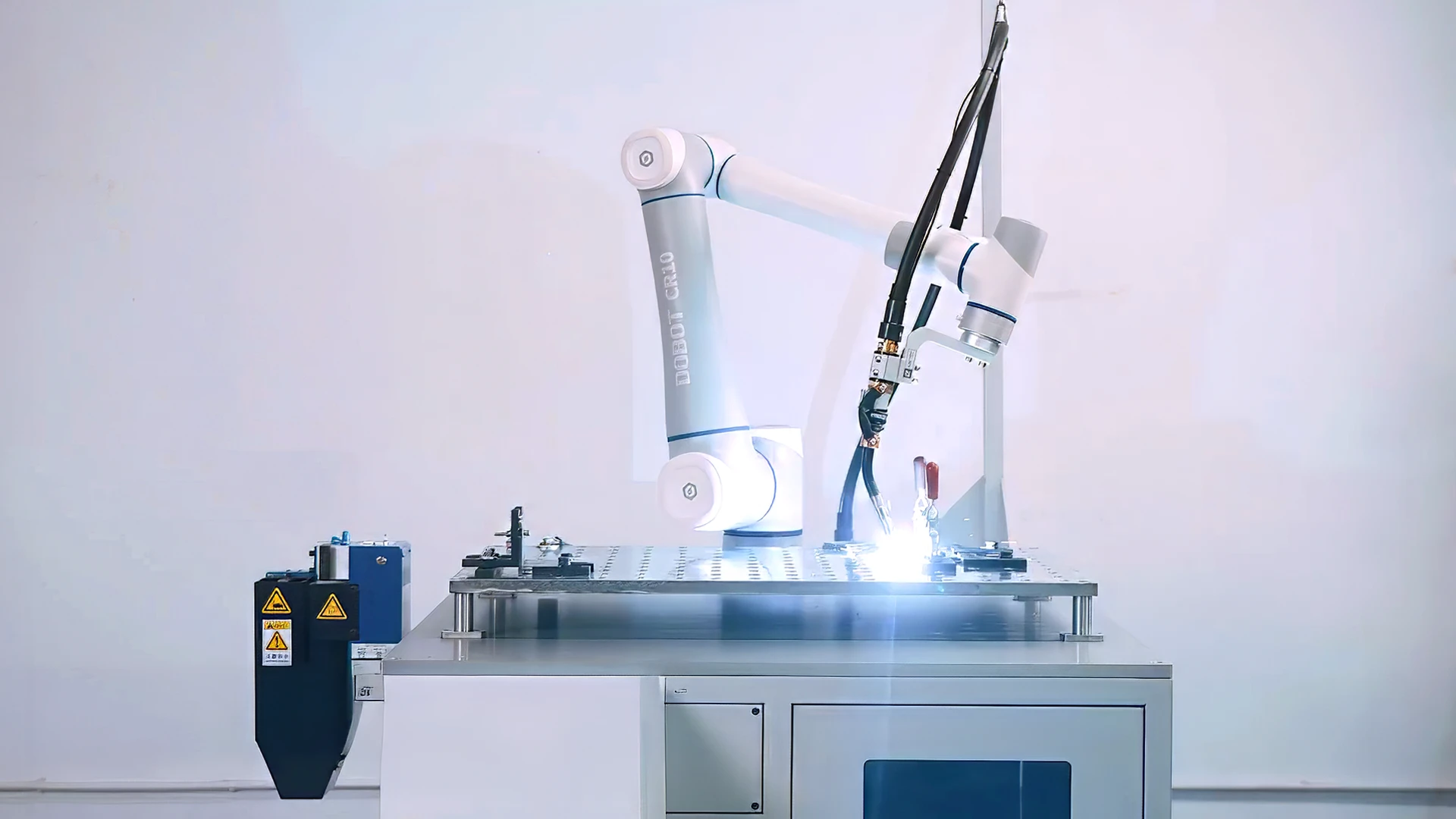
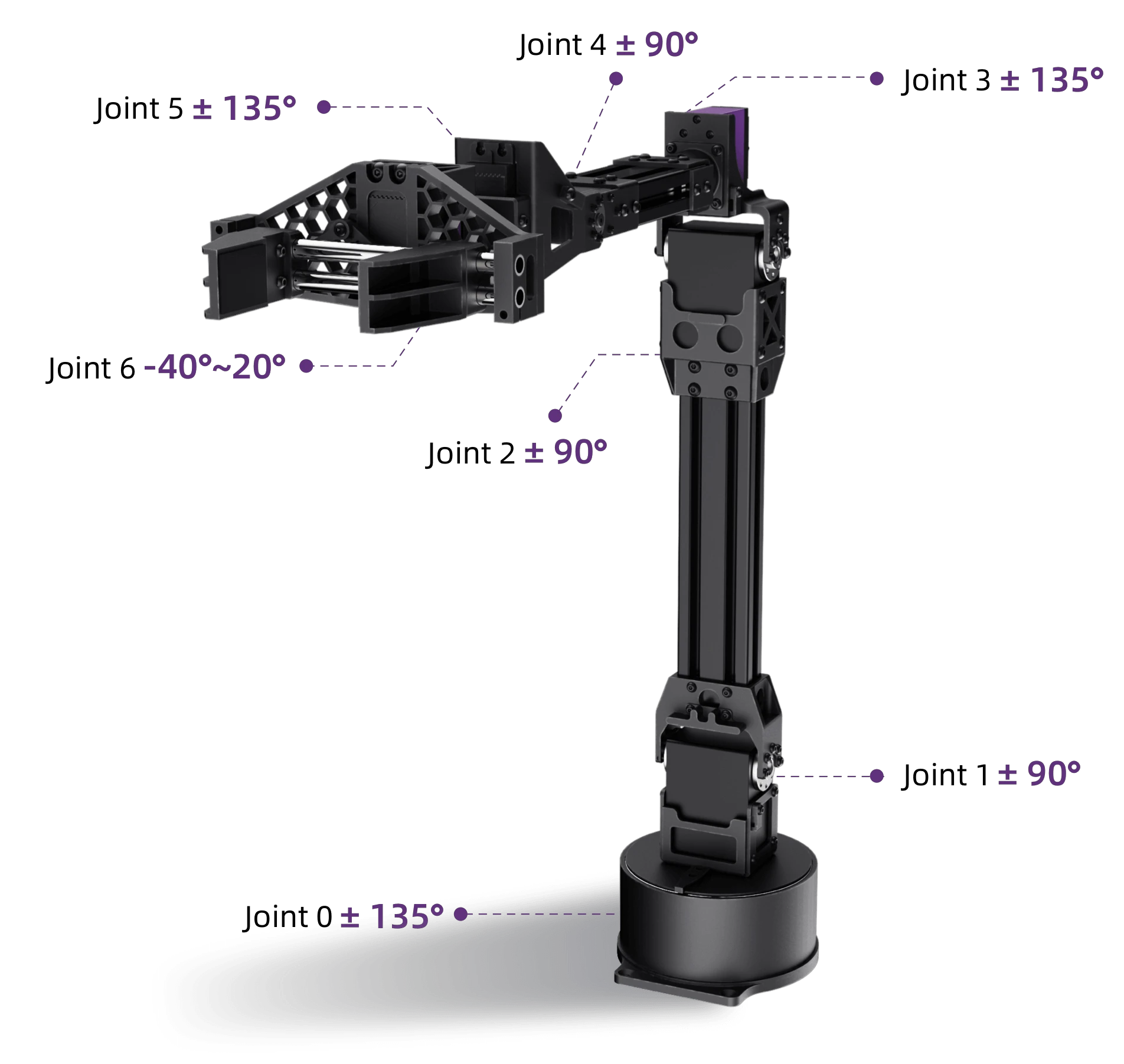
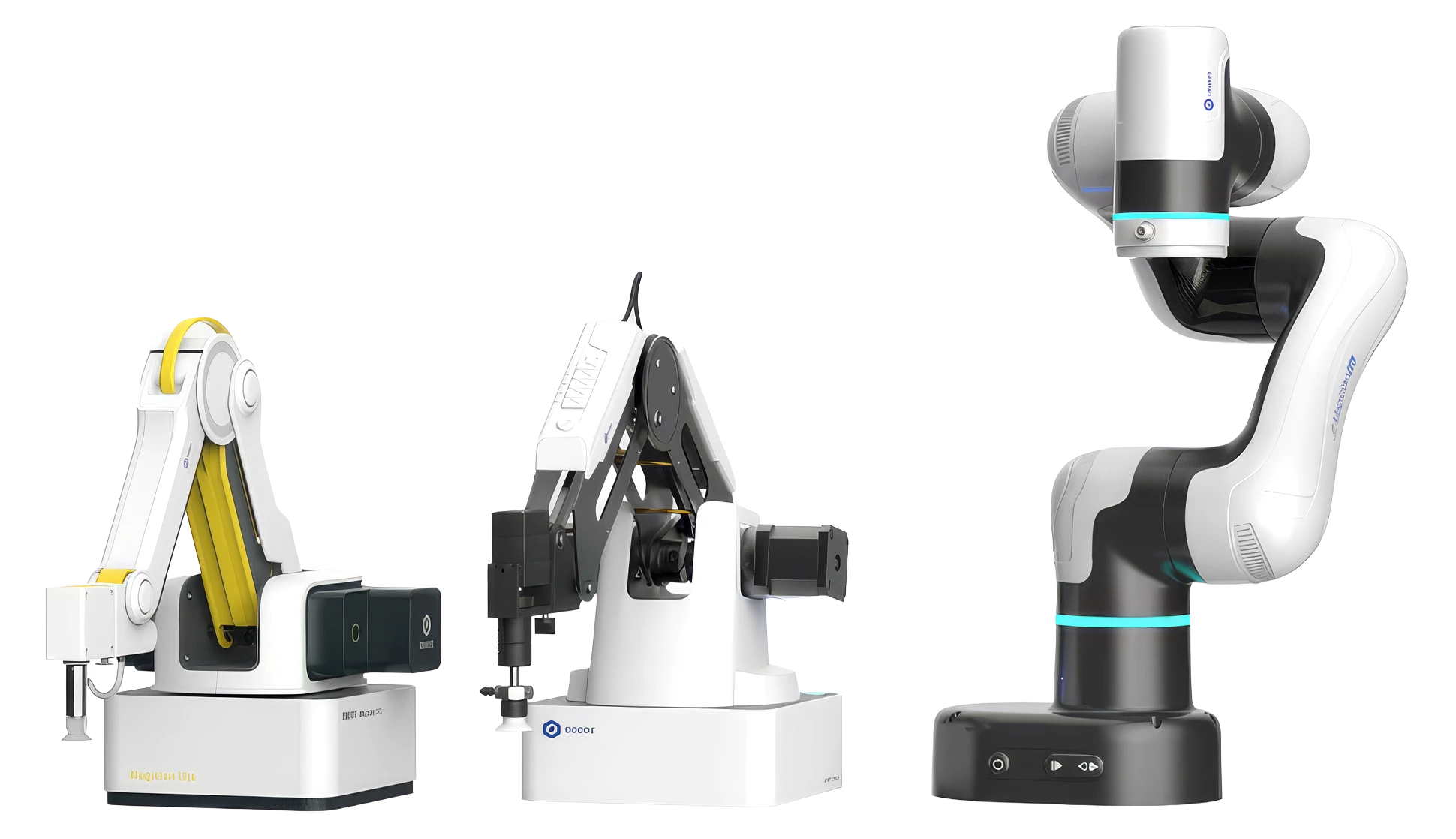
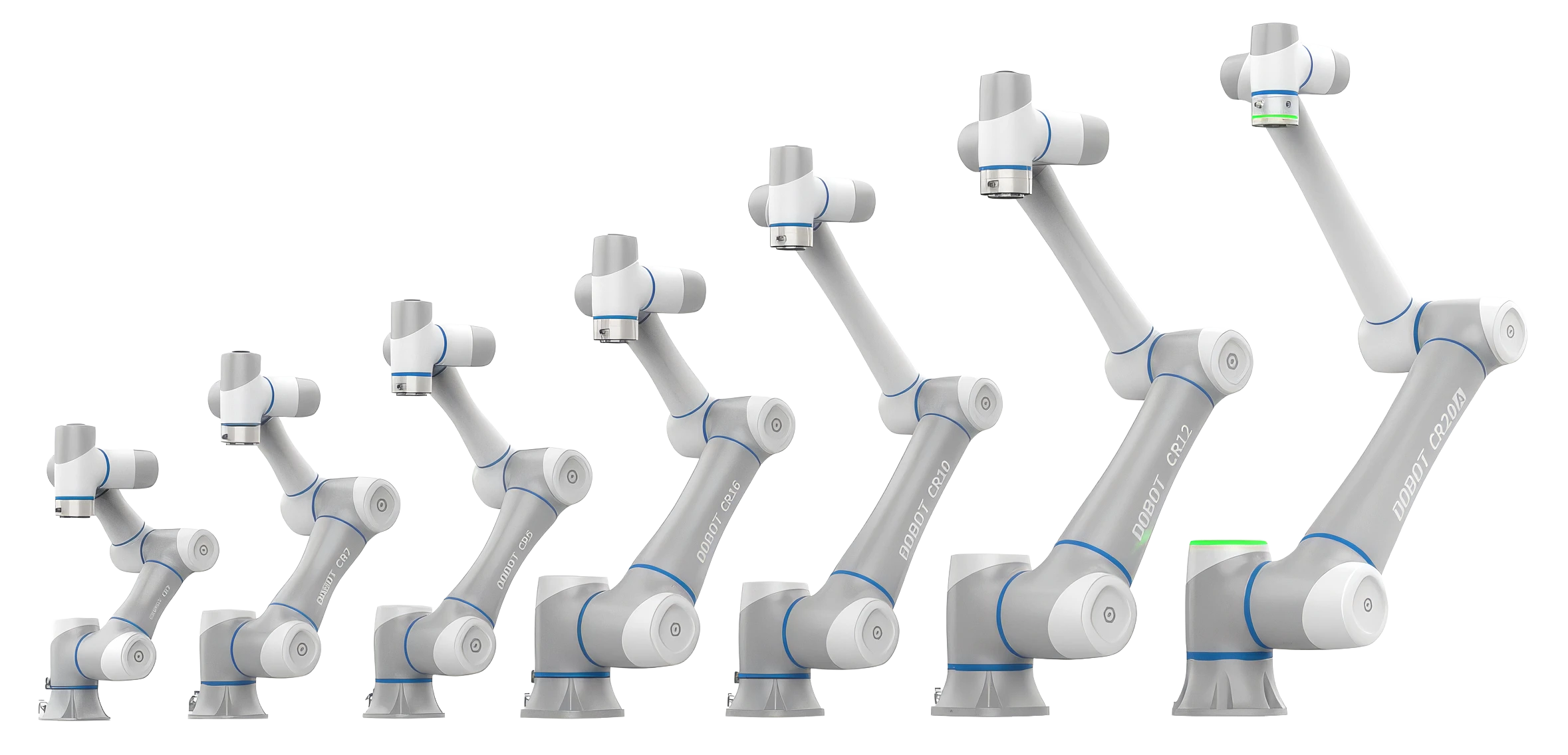
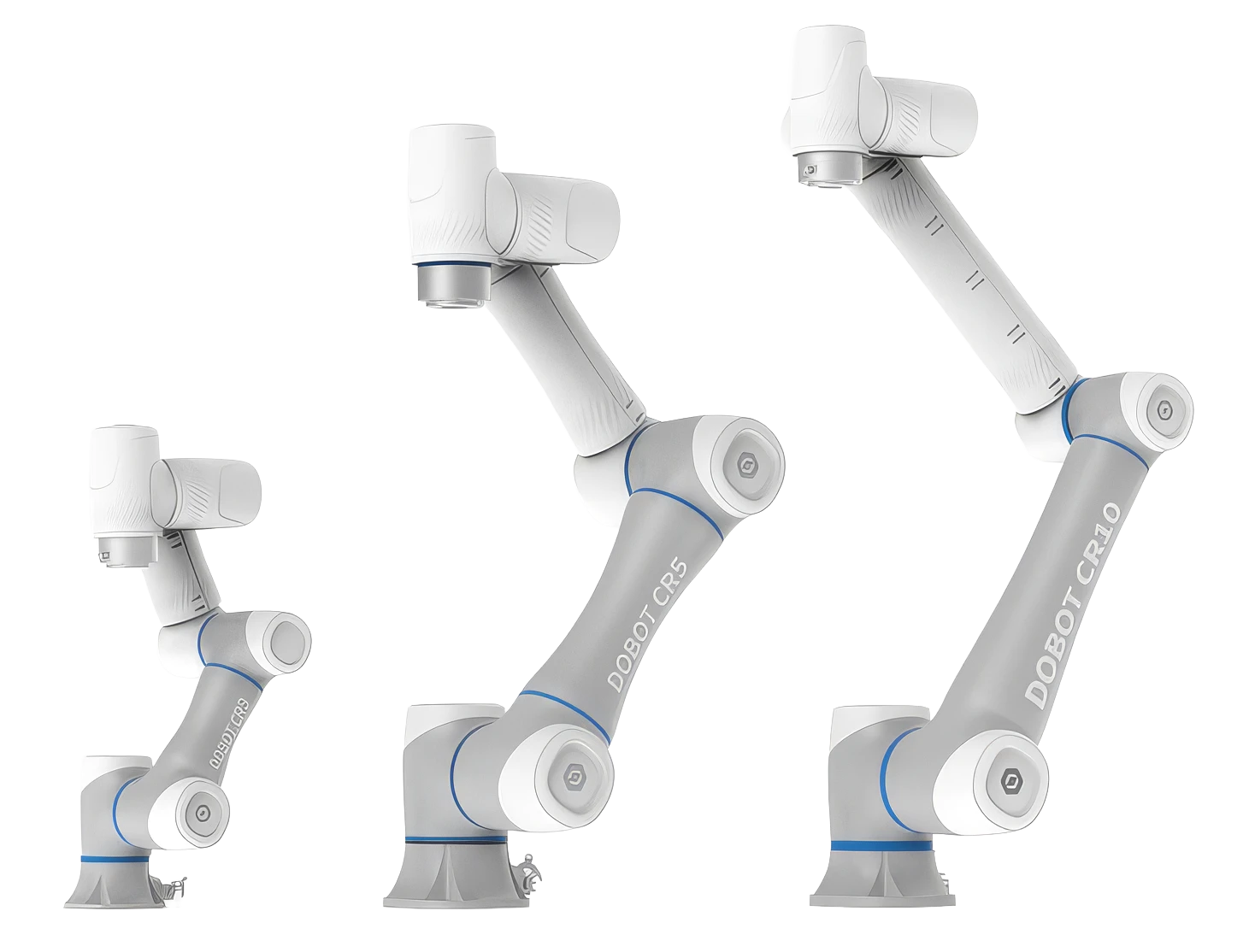
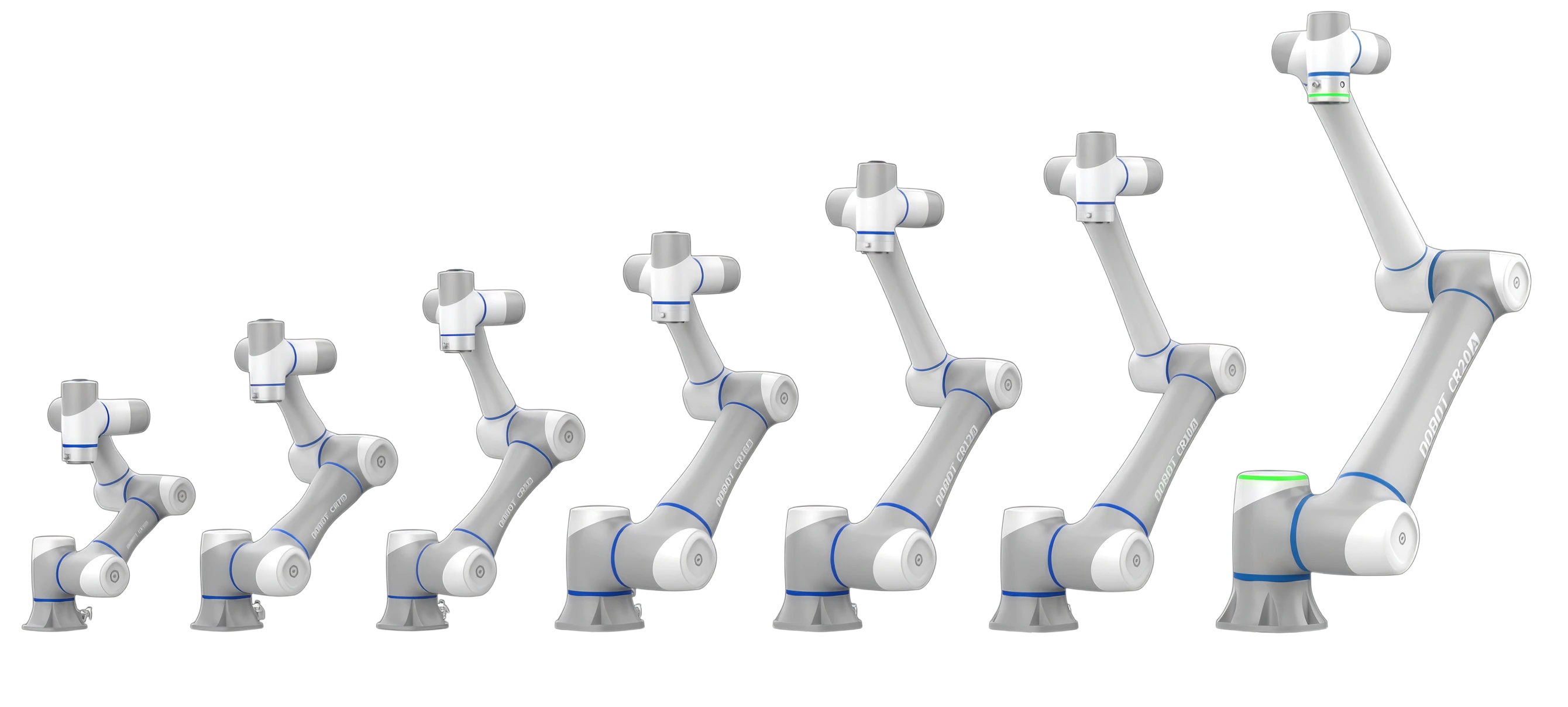
Selecting the right robot is crucial depending on how you intend to use it. This could be simply to perform a repetitive task in a manufacturing environment where a robotic arm would excel. However, when advanced mobility including physical security, inspection or load carrying, an AI-powered quadruped or humanoid robot is required. Although at first glance there doesn't appear to be much difference between similar looking robotic arms, quadruped or humanoid robots, their capability for customisation can be significant. This guide walks you through the range of robots available from Scan, starting with how they move, their ability to perceive their environment and their customisation.