PRESSZONE
NVIDIA Isaac Explained
Physical AI systems - humanoid robots, quadruped robots or robotic arms - capture and process information from their sensors and actuators to perform their functions. However, if you want to introduce any degree of AI automation and learning, especially in complex environments then the data and processing demands demand a whole other level of performance. This is often referred to as the three-computer problem, or the three-computer solution, as NVIDIA define three distinct levels of compute to achieve this - DGX servers for training, Omniverse deployed on RTX PRO servers for simulation, and Jetson GPUs embedded within robots.
During the middle training and simulation phase, NVIDIA Isaac is the primary software platform employed. Isaac is a comprehensive, open robotics software platform that accelerates the development and deployment of AI-powered robots, and consists of several individual elements including Isaac Sim, Isaac Lab, Isaac ROS and Isaac GR00T. There is also a dedicated Isaac for Healthcare stream that focuses on specialised tools for developing medical and surgical robotics. Let’s explore each of these a little further.
Isaac Sim
NVIDIA Isaac Sim is a physically-accurate robotics simulation platform built on the NVIDIA Omniverse platform. It enables developers to design, test, train, and deploy AI-driven robots in photorealistic virtual environments before building them in the real world. It allows the testing of robotic systems without potential real-world damage or danger; and the simulation of various sensors, including LiDAR, ultrasonic sensors, and RGB / depth cameras for model training.
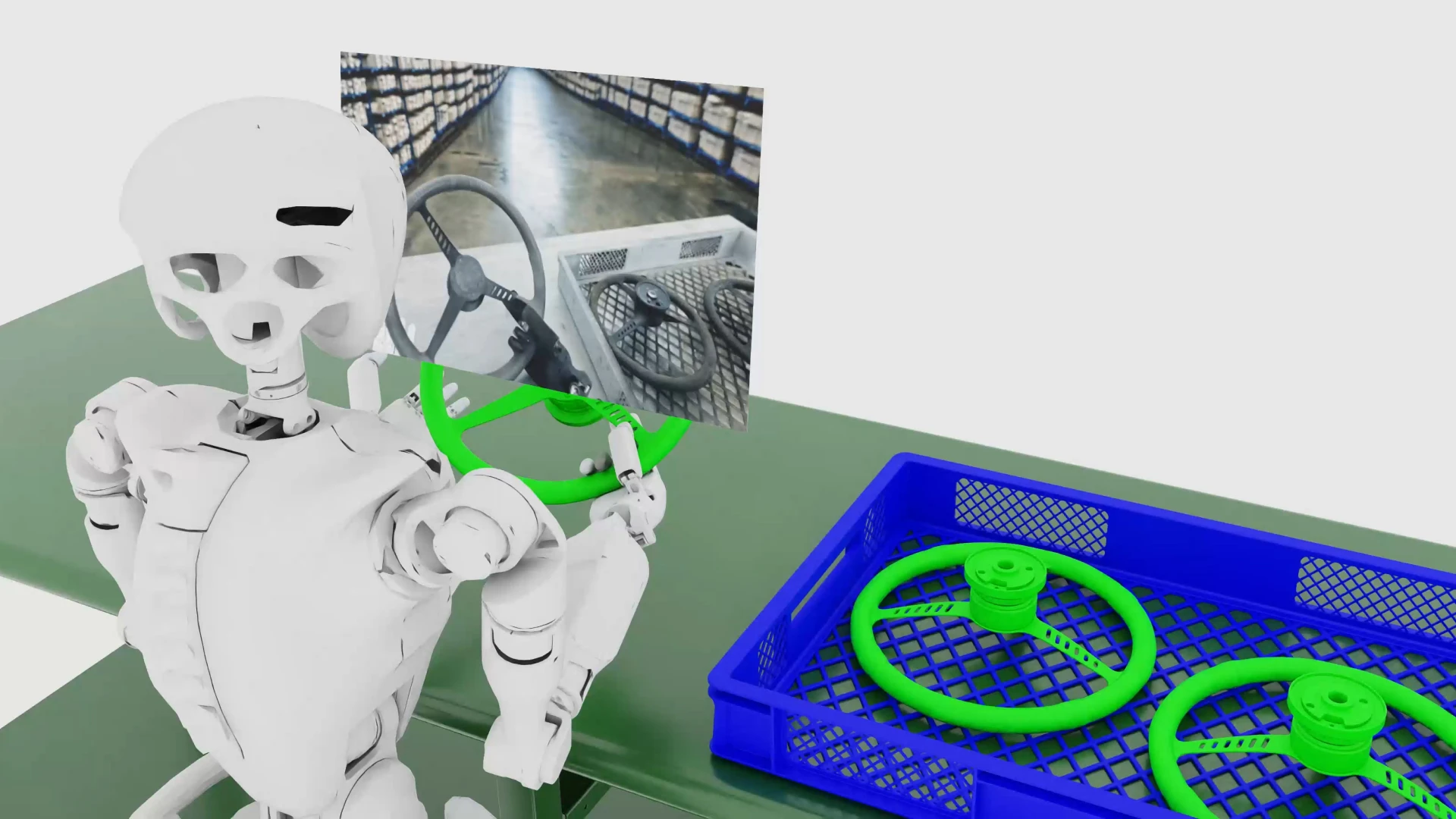
Isaac Sim can also automatically generate labeled data for AI training, solving real-world data shortages; and it pairs with Isaac Lab, for reinforcement learning so robots can learn how to walk, grasp, or navigate.
Isaac Lab
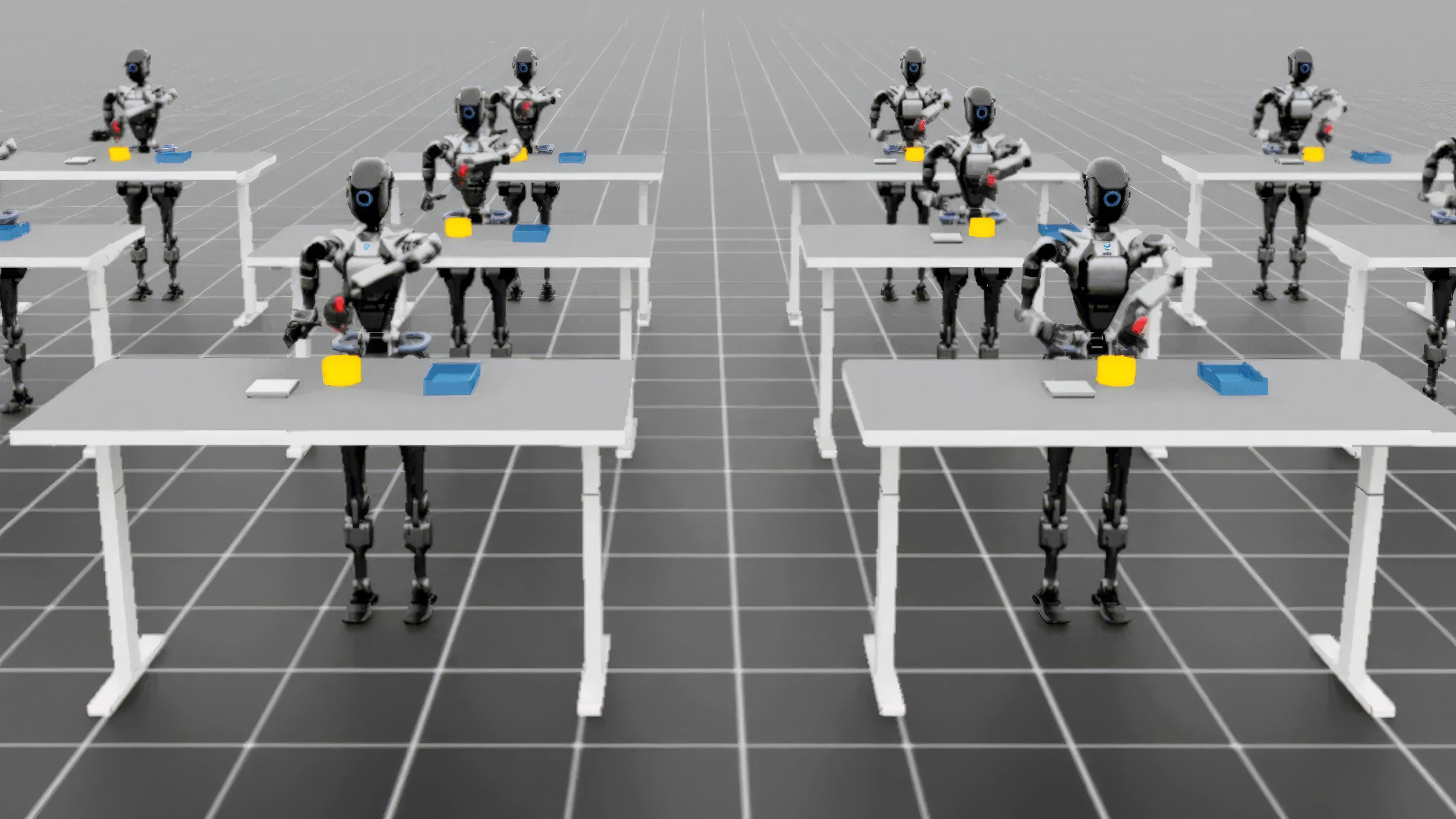
NVIDIA Isaac Lab is an open-source, modular framework for training robotic policies at scale using reinforcement and imitation learning. It provides developers with GPU-accelerated physics and high-fidelity sensor simulations to rapidly teach robots how to grasp and manipulate objects; or walk, navigate, avoid obstacles and cope with unpredictable terrain. Built on NVIDIA Isaac Sim, it leverages photo-realistic rendering with highly accurate physics to make 'sim-to-real' training seamless, with trial-and-error cycles porting directly into physical robots.
Isaac Lab also serves as the foundational robot learning framework of the NVIDIA Isaac ROS and GR00T platforms.
Isaac ROS
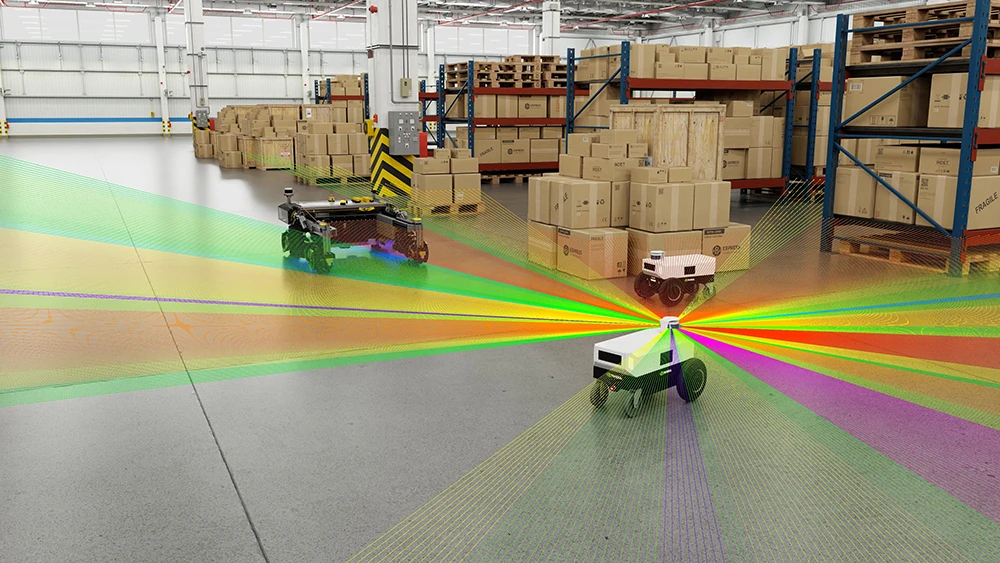
NVIDIA Isaac ROS (Robot Operating System) is a low-level, modular perception and navigation framework, built on the ROS 2 open framework, including ready-to-use packages for common tasks for optimal performance. It leverages NVIDIA hardware to provide advanced, realtime spatial awareness for object tracking, depth estimation, and 6D pose estimation, allowing developers to build faster, smarter, and more efficient robots by deploying models directly on embedded NVIDIA Jetson GPUs.
Although Isaac ROS acts as a general use platform for robotic development, Isaac GR00T is considered a specialised framework for 'whole body control’ in advanced humanoids.
Isaac GR00T
NVIDIA Isaac GR00T (Generalist Robot 00 Technology) is a comprehensive development platform and open foundation model that accelerates the creation of general-purpose humanoid robots. It integrates with Isaac Lab and Omniverse to act as the brain and development ecosystem, enabling robots to process text, voice, video, and prior human demonstrations to break down complex instructions and execute them with human-like reasoning.
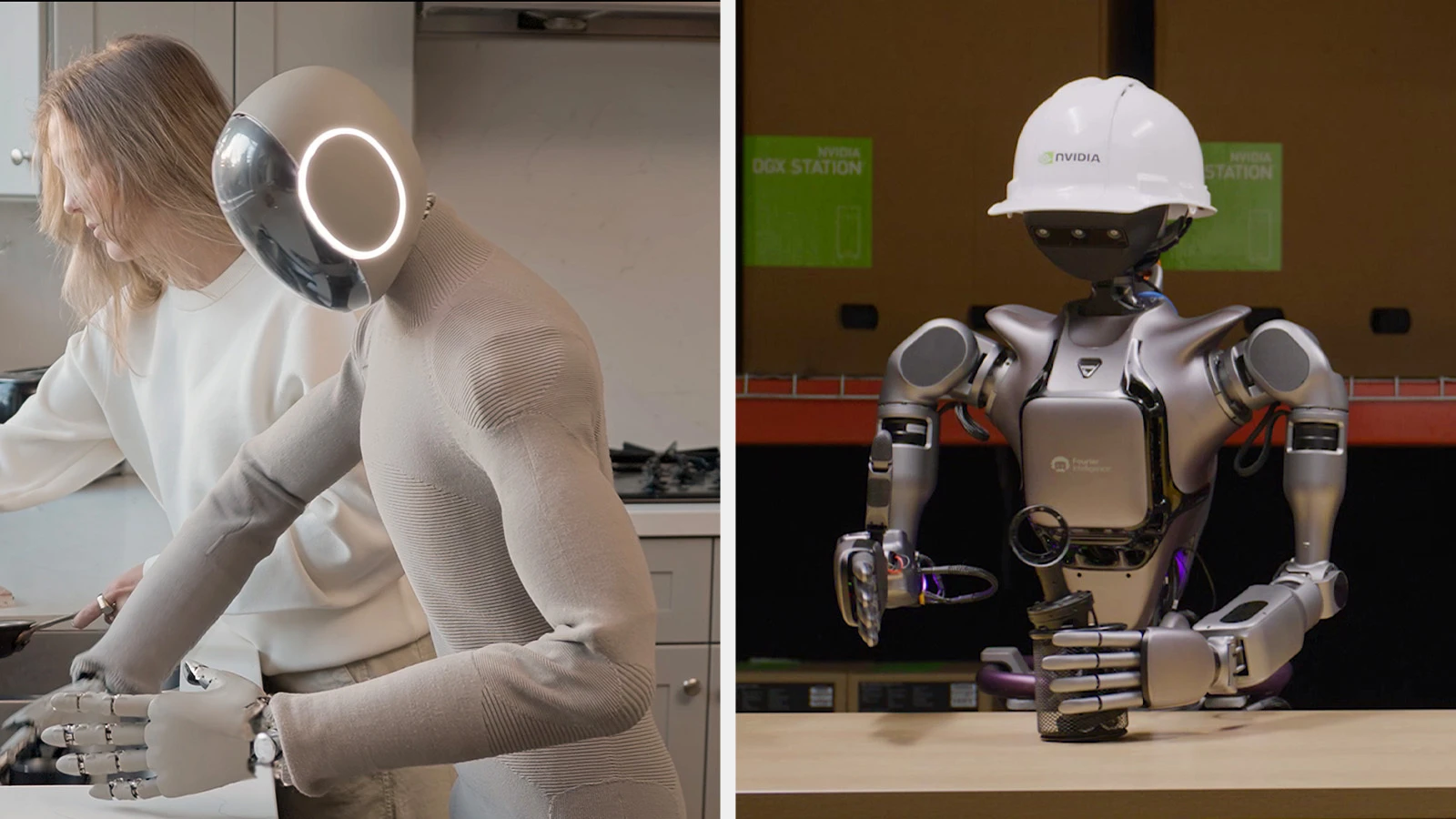
GR00T is capable of synthetic motion generation using minimal real-world human demonstrations to create large synthetic datasets. It then uses a 'thinking fast and slow’ approach to learn, whereby a slow-thinking system reasons and plans the correct actions, and a fast-thinking system translates those plans into precise, continuous, whole-body physical movements.
Isaac for Healthcare
Isaac for Healthcare is a purpose-built version of the Isaac platform containing tools that provide pre-trained AI models, simulation environments, and accelerated libraries dedicated to medical and assistive robotics. It supports developers across the entire workflow—from collecting and curating medical data to building and testing AI models in realistic simulated surgical environments, where robots can practice tasks virtually, learn from their mistakes using reinforcement learning, and then transfer those learned policies directly to physical machines.
As real patient data is often hard to gather or privacy-restricted, Isaac for Healthcare allows developers to generate photorealistic, physically-accurate synthetic data to train their AI on a massive scale.
NVIDIA Isaac is just one of many NVIDIA pre-trained frameworks and libraries that accelerate AI development, training and deployment - all available via the NVIDIA AI Enterprise suite. You can learn more by reading our AI applications page.